Abstract
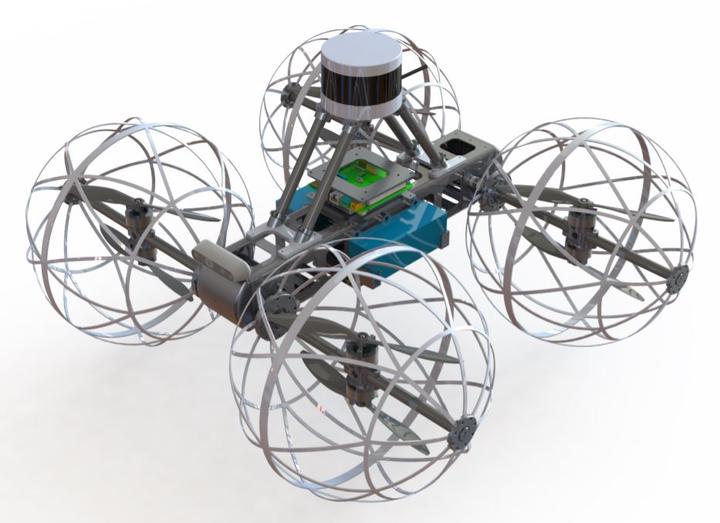
Aerial robots show promise for increased capabilities in exploring unstructured and challenging environments. However, they are limited by payload capacity, flight times, and susceptibility to damage in case of collision. On the other hand, ground robots are able to carry larger payloads and have a lower cost of transport, at the price of limited mobility over challenging terrain. This paper presents a hybrid aerial/ground vehicle that combines the capabilities of both types of vehicles to enable multi-modal mobility in diverse and challenging environments, a lower cost of transport compared to purely aerial vehicles, increased payload capacity, and a design that is more robust to collisions and physical interaction within potentially cluttered and narrow spaces. The design consists of a UAV with four independently actuated spherical wheels which, in addition to providing traction for ground mobility, protect the propellers in collision. In comparison to hybrid vehicles with passive wheels presented in other designs, actuated wheels mitigates perception degradation in dusty environments caused by downwash from thrusting close to the ground. In addition, the integration of an end-to-end autonomy stack is presented which enables the control, planning, and autonomous navigation of the hybrid vehicle in unknown environments. The controls framework employs a geometric tracking controller for aerial trajectories and a cascaded position and velocity controller for ground mobility. We leverage motion primitives to locally plan collision-free paths and a differential flatness mapping to generate kinodynamically feasible trajectories for both terrestrial and aerial modalities in a unified manner. Lastly, we utilize a grid based A* search and probabilistic 3D mapping based on octrees to plan geometric aerial/ground paths to a goal. With this framework, we hope to demonstrate the capabilities of this hybrid aerial/ground vehicle in challenging unknown environments and improved energy efficiency for hybrid mobility over purely flying.