Hi! I’m a robotics research scientist at Caltech. My work involves R&D on autonomous quadrupeds, drones, and space robots. I have professional experience in robotic hardware design, microcontroller system firmware, and robotic software implementation. I’ve had the privilege of working at JPL, Caltech and NASA on various projects including the DARPA Subterranean Challenge, OMEGA Project, NeBula AI solution, BRAILLE and more. My current focus is on creating resilient and autonomous robotic systems for exploration of complex environments on Earth and other celestial bodies.
When I’m not at work, I’m back home on my farm with my squad (my five mischievous hunting dogs), riding dirt bikes, flying drones, weightlifting, tinkering with machinery, spending time with my grandparents, and working on the farm.
- Robotics (Aerial & Legged)
- Autonomous Space Systems
- Artificial Intelligence
- End-to-end prototyping
-
M.Eng in Robotics and Mechatronics, with Distinction (with Distinction)
Royal Melbourne Institute of Technology
-
B.Eng in Environments (Civil Engineering)
The University of Melbourne
Projects
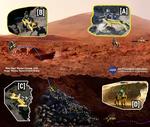
DARPA Subterranean Challenge
Team CoSTAR takes on the DARPA Subterranean (SubT) Challenge which aims to develop innovative technologies that would augment operations underground. The SubT Challenge will explore new approaches to rapidly map, navigate, search, and exploit complex underground environments, including human-made tunnel systems, urban underground, and natural cave networks.
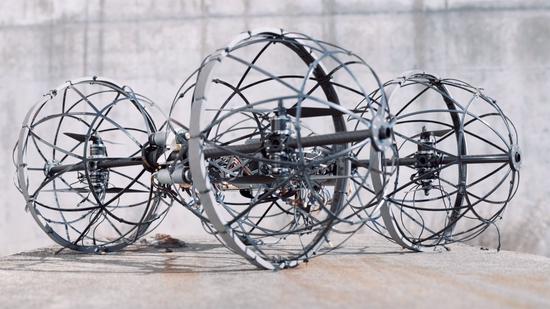
Rollocopter & Drivocopter
Is it a rover or a flyer? It’s both. Rollocopter & Drivocopter are hybrid aerial and terrestrial platforms. They use a quadrotor system to fly or roll along on passive and actuated wheels.

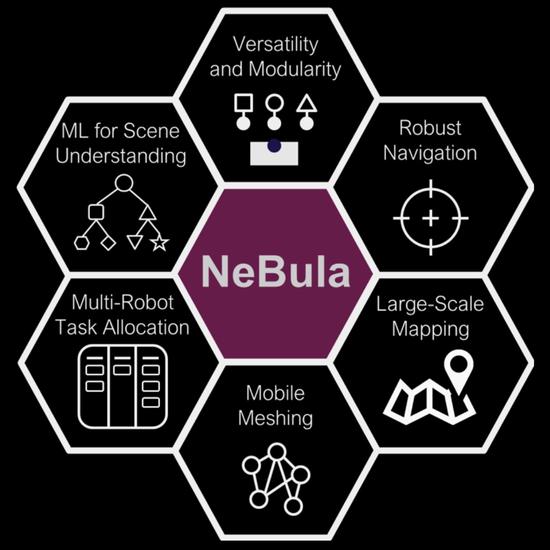
NeBula Autonomy Solution
To address various technical challenges across multiple domains in autonomous exploration of extreme environments, we develop a unified modular software system, called NeBula (Networked Belief-aware Perceptual Autonomy).
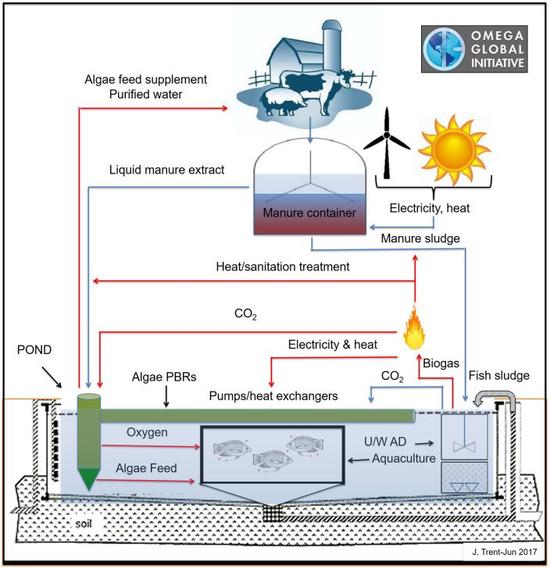
OMEGA M-Powered Farm
The OMEGA Project (Offshore Membrane Enclosures for Growing Algae) led by NASA and the Omega Global Initiative, is an innovative method to grow algae, clean wastewater, capture carbon dioxide and to ultimately produce biofuel without competing with agriculture for water, fertilizer or land.

BRAILLE
BRAILLE is a research project funded by NASA’s Planetary Science and Technology through Analog Research (PSTAR) program. The project’s objectives are to characterize microbial life and its life signatures (biological, mineralogical, and chemical) within volcanic caves, demonstrate sub-surface activities using robots in a Mars Mission scenario, and assess the performance of the robot-mounted scientific instruments in low or no light settings to explore, map, and assist in remote astrobiology science.