Deployable Mesh Network for Enabling Reliable Communication from within Subsurface Voids to the Planetary Surface
Abstract
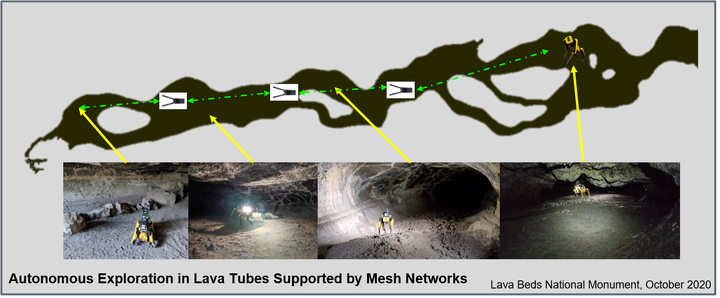
Exploring Planetary subsurface voids is important for research in astrobiology, geophysics and human habitability. Communication in these environments is difficult due to non-line-of-sight multipath environments. Constructing reliable communication systems is a critical element in enabling efficient robotic operations in subsurface voids. We developed a multi-robot communications system named CHORD (Collaborative High-bandwidth Operations with Radio Droppables). CHORD enables a team of robots to form a mobile ad-hoc network using range-limited wireless devices. There are two types of agents in CHORD, mobile robots and semi-mobile communication nodes which are carried and deployed. The nodes serve to enable three different purposes: (i) Communication: reliable and low latency communication between agents and robots on surface (ii) Positioning: ranging measurements from each node help mobile agent positioning inside GPS-denied (on terrestrial applications) and orbiter-denied (in planetary setting) environment (iii) Science measurements: the measurement of certain phenomenon in multiple locations simultaneously. This enables deeper understanding of the spatial temporal phenomenons in subsurface voids and caves. CHORD supports dynamic changes in network topology, advanced routing, and network QoS (Quality of Service). We developed communication-aware planning algorithms that strategically deploy on-board communication relays by taking into consideration the geometry of the environment, terrain type, and other characteristics that affect communication quality and reliability. CHORD has been developed at JPL and demonstrated in an underground environment as part of Team CoSTAR’s solution at the 2020 DARPA Subterranean that won 1st place. In this event, CHORD enabled reliable communications for robot exploration missions hundreds of meters into an underground environment, via a mesh network consisting of dropped communication nodes. The mesh network enabled high bandwidth data transmission to the base station for live-monitoring, teleoperation and collaborative 3D topology map building. In this presentation, we will describe our CHORD system and show a promising application for future planetary subsurface exploration.